- Install
- Basic operation
- Basics of programming for electronic work
- Basics of programming for Excel
- Machine learning with scikit-learn
- Visualizing data with matplotlib
- Web programming
- RPA programming
- Miscellaneous programming
- Reference
Control MPU6050
You can control the MPU6050 accelerometer/gyro sensor.
The MPU6050-related blocks are in the "Sensor" - "Motion" - "MPU6050" group.
Connection
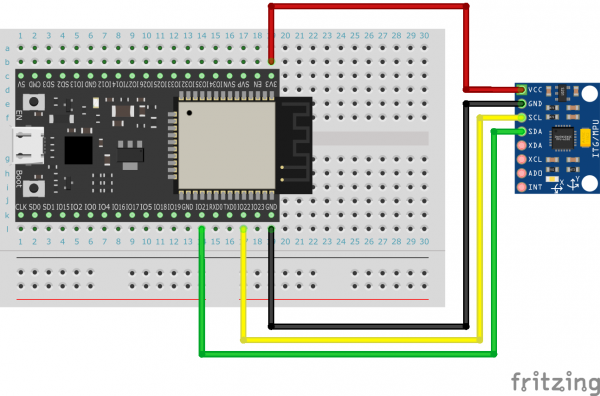
The microcontroller and MPU6050 are connected via I2C.
If the microcontroller has fixed I2C SDA/SCL pins, use those fixed pins.
For example, when connecting to an ESP32, connect as shown in the diagram below.
Also, for microcontrollers where the I2C SDA/SCL pins are not fixed, specify the pin numbers to which the SDA/SCL are connected during initialization.
Initialization
For microcontrollers where the SDA/SCL pins are fixed, use the following initialization block.
![]()
Also, for microcontrollers where the SDA/SCL pins are not fixed, use the following initialization block to specify the pin numbers to which SDA/SCL are connected.
![]()
Getting information
To get information from MPU6050, first execute the block that updates the information.
![]()
Then, use the block that gets information to get acceleration and angular velocity information.
The unit of acceleration is G (gravitational acceleration).
The unit of angular velocity is degrees/second.
![]()
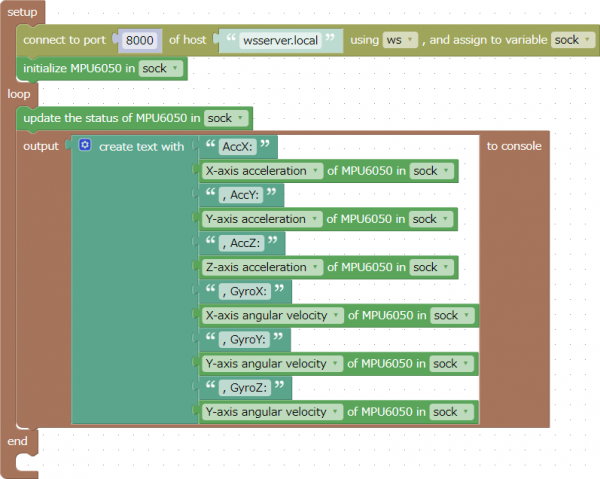
Example
This is an example of getting acceleration and angular velocity from the MPU6050 and outputting that information to the console.
This program can be downloaded from here.