- インストール
- 基本操作
- 電子工作向けプログラミングの基本
- Excel向けプログラミングの基本
- scikit-learnでの機械学習
- matplotlibでのデータの可視化
- Web関連プログラミング
- RPA関連プログラミング
- その他の各種プログラミング
- リファレンス
MPU6050の制御
加速度/ジャイロセンサーのMPU6050を制御することができます。
MPU6050関連のブロックは、「センサー」→「モーション」→「MPU6050」のグループにあります。
接続
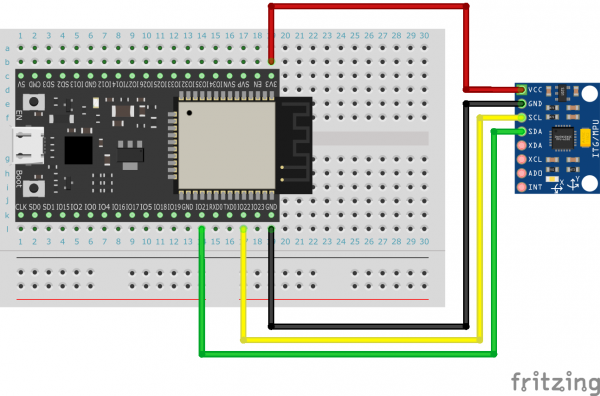
マイコンとMPU6050の間は、I2Cで接続します。
I2CのSDA/SCLのピンが固定になっているマイコンでは、その固定のピンを利用します。
例えば、ESP32と接続する場合は、以下の図のように接続します。
また、I2CのSDA/SCLのピンが固定になっていないマイコンでは、初期化の際にSDA/SCLを接続したピンの番号を指定します。
初期化
SDA/SCLのピンが固定になっているマイコンでは、以下の初期化のブロックを使います。
![]()
また、SDA/SCLのピンが固定ではないマイコンでは、以下の初期化のブロックを使い、SDA/SCLを接続したピンの番号を指定します。
![]()
情報の取得
MPU6050からの情報を取得するには、まず情報を更新するブロックを実行します。
![]()
その後に、情報を取得するブロックを使い、加速度や角速度の情報を得ます。
加速度の単位は、G(重力加速度)です。
また、角速度の単位は、度/秒です。
![]()
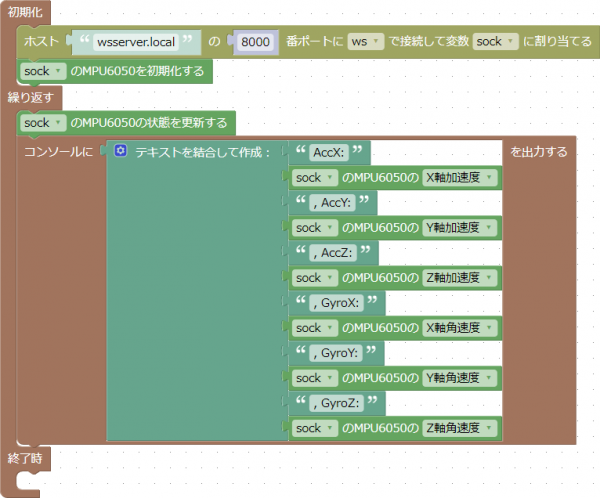
事例
MPU6050から加速度と角速度を取得し、それらの情報をコンソールに出力する例です。
このプログラムは、こちらからダウンロードすることができます。